
Discover the powerful capabilities of the X1 Open-Source Humanoid Robot
34 active joints
Human-grade dexterity
Walks 1 m s⁻¹ · turns in place
0.5 kg single-arm payload
EtherCAT & FDCAN, SPI, UART,
GPIO
OmniPicker adaptive gripper
Hardware CAD & code on GitHub
Explore X1’s breakthrough innovations that redefine embodied AI robotics
Lifelike Bio-Signals & Expressive Motion
Every limb, servo and electronic board is documented and replaceable, turning AgiBot X1 into a “LEGO-style” humanoid that can be rebuilt, upgraded or repaired without vendor lock-in.
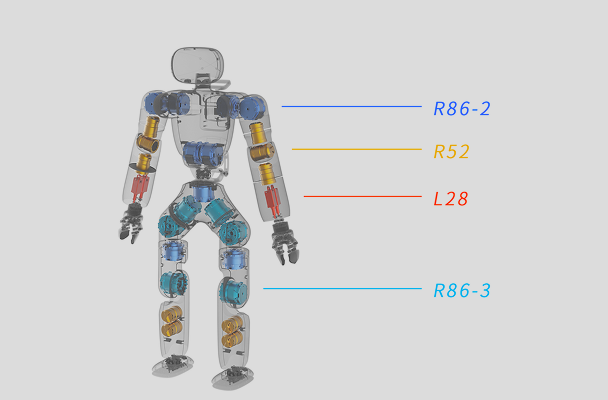
Hot-swap servos — change an R86 or R52 joint in under three minutes, no recalibration jig required
Public STEP / BOM files — full mechanical drawings, PCB schematics and firmware on GitHub for true transparency
Add-on friendly — spare mounting rails and 24 V / 5 A aux power let you bolt on cameras, LiDAR or custom grippers
Real-Time Control Backbone
A dual-bus EtherCAT & FDCAN network streams joint data at 1 kHz, keeping all 34 DOF moving in perfect sync even during dynamic maneuvers.
Cascade up to 16 decentralized control units with micro-second-level timestamp alignment
1 kHz whole-body torque loop for smooth balancing, jumping and push-recovery demos
Linux & ROS 2 SDK delivers deterministic control plus high-level behaviour scripting in Python or C++
Safety-First, Lightweight Build
At just 33 kg, the aluminium-carbon frame stays nimble while force-limited joints and dual-channel failsafes protect users in close-quarters interaction.
Force & velocity limits on each servo instantly reduce power if unexpected contact is detected
Low-inertia limbs minimise collision energy—ideal for classrooms, labs and expo booths
Integrated cable routing keeps wires tucked inside the skeleton, eliminating snag hazards
Labs run whole-body control and embodied-AI tests on a standard, open robot. EtherCAT timing and open CAD let teams compare results with full transparency.
Graduate students experiment with real-time torque control and ROS 2 in class. Open Python APIs turn theory lessons into quick, hands-on demos.
| Active DoF | 34 (29 base joints + 2 grippers + 3 head DoF) |
| Height / Weight | 130 cm · 33 kg |
| Walk Speed | 1 m s⁻¹ (flat ground) |
| Runtime | ≈ 2 h per battery pack |
| Arm Payload | 0.5 kg (single arm) |
| Core Servos | R86-3 (200 N·m), R86-2 (80 N·m), R52 (19 N·m), L28 linear (110 N) |
| Control Bus | EtherCAT ↔ FDCAN (5 Mbps) · up to 16 DCUs cascade |
Ready to start your journey with us? Contact us to learn more about our programs, rentals, and event spaces.