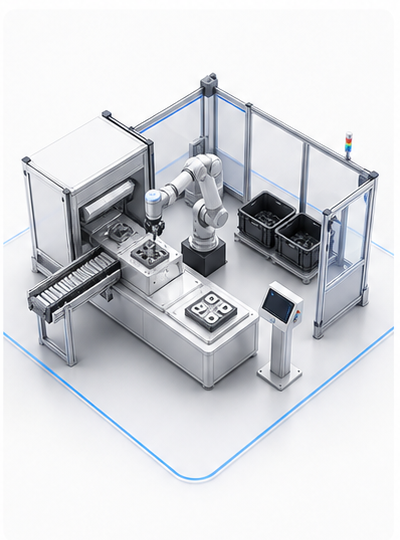
Hardware Layer
Arm, tooling and mounting
Reach, payload, installation orientation, working area and end-effector method can be configured around the handling task.
Wonder Byte delivers custom robotic automation in Australia with Brisbane-based consultation, deployment planning and local project coordination. When a standard coffee robot or kitchen format does not fit, we scope a mechanical arm solution around the customer's workflow, equipment layout, safety requirements, site constraints and production targets.

Most projects are shaped through three decisions: the arm and tooling itself, the physical cell around it and the control logic that ties the process together.
Reach, payload, installation orientation, working area and end-effector method can be configured around the handling task.
Pickup points, drop positions, staging zones, guarding and operator interaction can be arranged around the line and surrounding machines.
PLC, software, trigger conditions, step transitions, cycle targets and operator handoff expectations can be scoped around the customer's actual production sequence.
This route is for projects where the requirement is driven by the site's own equipment, layout, sequence or operator handoff. The solution is shaped around the task instead of forcing the task into a fixed standard format. If a standard format already fits, start with the coffee robot or kitchen robot solution pages instead.
Current machines, conveyors or workstations need to stay in the operating workflow.
Reach, mounting position, guarding and operator access depend on the actual floor plan.
Pickup order, handoff sequence, cycle timing or trigger conditions are specific to the job.
A fixed coffee, kitchen or service robot format does not match the production requirement.
Every custom mechanical arm project starts with the workflow itself: what action needs to happen, what machine or station is involved and what output the customer is targeting.
What the arm needs to move, load, place, transfer or operate, and under what timing conditions.
Task, output target and cycle expectation.Machines, stations, utilities, safety rules and operator handoff points are reviewed together, not in isolation.
Equipment context, layout and guarding logic.Arm platform, tooling, layout and control logic are selected to fit the customer's actual operating environment.
Recommended arm cell, tooling and control scope.Use this route when the requirement does not map cleanly to a standard coffee robot or kitchen automation format, or where the process depends heavily on your own equipment and layout.
Yes. Arm selection, reach, payload, mounting method, tooling and the way the arm interacts with surrounding equipment can all be scoped around customer requirements.
The task description, target throughput, available space, safety constraints and the machines or workstations the arm needs to work with are usually enough to start scoping.
Yes. Wonder Byte delivers Brisbane-based consultation, planning and project coordination for custom robotic automation projects in Australia.
Tell Wonder Byte about the task, surrounding equipment, floor space, safety conditions and output target. Our local team can help scope a custom mechanical arm solution built around your actual requirements.